
申请日2017.12.19
公开(公告)日2018.05.04
IPC分类号C02F1/00
摘要
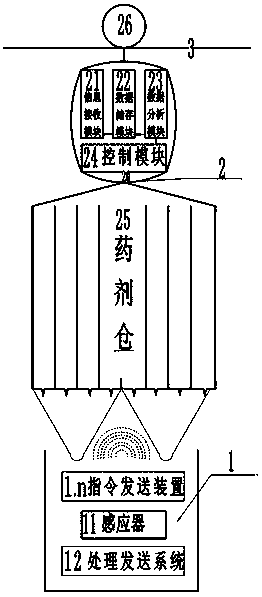
本发明涉及一种污水处理领域机器人,具体包括指令发送装置,加药机器人,所述指令发送装置安装在污水设备的药剂管路上,所述指令发送装置包括感应器,感应信息处理发送系统,所述感应器用来感知接受药剂信息,并将所述药剂信息实时地发送到所述感应信息处理发送系统,所述机器人包括头部单元、药剂仓、驱动系统,所述驱动系统与所述缆路通道连接以方便运动行走,所述驱动系统下方是所述机器人头部单元,所述头部单元下方设置药剂仓,所述头部单元能智能控制所述药剂仓和所述驱动系统以实现所需求以及精准加药,达到了提高对污水工艺参数的执行准确度的效果,节省了执行时间和成本,人员安全有保障,在化学危害和安全领域具有广泛用途。
权利要求书
1.一种污水处理厂加药用机器人,包括指令发送装置,加药机器人,其特征在于:所述指令发送装置安装在污水设备的药剂管路上,所述指令发送装置包括感应器,感应信息处理发送系统,其中,所述感应器用来感知接收药剂信息,并将所述药剂信息实时地发送到所述感应信息处理发送系统;
所述机器人包括头部单元、药剂仓、驱动系统,所述驱动系统与所述缆路通道连接以方便运动行走,所述驱动系统下方是所述机器人头部单元,所述头部单元下方设置药剂仓,所述头部单元能智能控制所述药剂仓和所述驱动系统以实现自我控制;
所述加药机器人头部单元至少且从左至右依次顺序连接有包括信息接收模块,用于接收感应信息处理发送系统发送的药剂信息,包括数据存储模块,用于存储各类数据和程序定义参数,还包括数据分析模块,所述数据分析模块读取所述存储模块中的药剂信息的参数和程序定义参数,还包括药剂控制和运动控制模块,所述参数至少包括加药名称,加药位置,加药类型,加药发生时间,并对每一个参数进行定义以获得该药剂信息的重要度指数,所述数据分析模块进一步根据该重要度指数和电子地图模块确定污水厂加药的行走路线;
所述感应信息处理发送系统对药剂信息处理转换,并将加药指令传讯到所述加药机器人,所述加药机器人头部控制单元接收来自所述指令发送装置加药信号,并对药剂信息进行综合分析,对缺药信息指令并控制执行加药任务。
2.如权利要求 1 所述的污水 处理厂加药用机器人,其特征在于:所述感应器为化学电流传感器和/或电磁感应器和/或嵌入式Web红外线感应器。
3. 如权利要求 2 所述的污水处理厂加药用机器人,其特征在于:当所述的感应器为化学传感和或红外线感应器时,所述感应信息处理发送系统对加药信号的传讯为射频方式。
4.如权利要求 3 所述的污水处理厂加药用机器人,其特征在于:所述加药名称、加药类型、加药发生时间通过常数定义法进行定义,其中,所述污水设备的重要程度越大则定义越高,对于所述加药时间,越早接收到的药剂信息定义越高,对于加药类型,越严重的加药定义越高,所述加药位置基于所述电子地图模块进行定义,所述加药机器人首先获取所述电子地图模块中记载的污水工艺单元中的加药口位置信息,然后在电子地图模块中标示的加药位置为每一个选择距离其最近的污水工艺单元中的加药口,然而计算出与所述最近的污水工艺单元中的加药口之间的实际距离,并将该实际距离作为加药位置的定义的基准,距离加药口点越近,所述加药位置定义越高,所述数据分析模块,还对所述参数的定义进行累加,求出该药剂信息的重要度指数。
5. 如权利要求 4 所述的污水处理厂加药用机器人,其特征在于:所述药剂信息的重要度指数通过对所述加药名称、加药类型、加药发生时间以及所述加药位置进行定义后进行累加而获得,并将所述重要度指数值按顺序从高到低地排序以确定所述污水厂加药的行走路线规划。
6.如权利要求 1 -5任何一种所述的污水处理厂加药用机器人,其特征在于:所述化学电流传感器为化学传感转换电流信号传感器。
说明书
一种污水处理厂加药用机器人
技术领域
本发明涉及机器人领域,具体涉及一种污水处理领域机器人。
背景技术
机器人是自动执行工作的机器装备,它既可以接收人类指挥,又可以运行预先编排的程序,可以协助或取代人类工作的工作,尤其是危险高、工作强度和伤害大、工作精度高、处理复杂事务的工作,在污水处理领域,由于处理厂工作区域大工作强度大,污水池较深存在安全风险,污水处理加药工作需及时准确,另外化学药剂工作可对人体的造成伤害,现有的加药工作主要依靠人工和辅助工作的设备,缺乏完成自己感知加药需求并根据程序定义控制自己,其工作精度低,没有物和物之间互动与感知,特别是现有的人工加辅助设备最大的问题还是存在安全和化学伤害的危险。
因此急需一种机器人来高效准确快速的处理污水处理药剂添加问题。进一步降低劳动者的强度,特别保护污水处理领域劳动者生命安全和减少人身伤害。
发明内容
在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围
为了解决上述问题,本发明公开了一种污水处理厂加药用机器人,包括指令发送装置,加药机器人,其特征在于:所述指令发送装置安装在污水设备的药剂管路上,所述指令发送装置包括感应器,感应信息处理发送系统,其中,所述感应器用来感知接收药剂信息,并将所述药剂信息实时地发送到所述感应信息处理发送系统;
所述机器人包括头部单元、药剂仓、驱动系统,所述驱动系统与所述缆路通道连接以方便运动行走,所述驱动系统下方是所述机器人头部单元,所述头部单元下方设置药剂仓,所述头部单元能智能控制所述药剂仓和所述驱动系统以实现所自我控制;
所述加药机器人头部单元至少且从左至右依次顺序连接有包括信息接收模块,用于接收感应信息处理发送系统发送的药剂信息,包括数据存储模块,用于存储各类数据和程序定义参数,还包括数据分析模块,所述数据分析模块读取所述存储模块中的药剂信息的参数和程序定义参数,还包括药剂控制和运动控制模块,所述参数至少包括加药名称,加药位置,加药类型,加药发生时间,并对每一个参数进行定义以获得该药剂信息的重要度指数,所述数据分析模块进一步根据该重要度指数和电子地图模块确定污水厂加药的行走路线;
所述感应信息处理发送系统对药剂信息处理转换,并将加药指令传讯到所述加药机器人,所述加药机器人设置在缆路通道上,用于接收来自所述指令发送装置加药信号,并对药剂信息进行初步分析,对正常的缺药信息指令执行加药任务。
进一步,所述感应器为化学电流传感器和/或电磁感应器和/或嵌入式Web红外线感应器。
进一步,当所述的感应器为化学传感和或红外线感应器时,所述感应信息处理发送系统对加药信号的传讯为射频方式。
进一步,所述加药名称、加药类型、加药发生时间通过常数定义法进行定义,其中,所述污水设备的重要程度越大则定义越高,对于所述加药时间,越早接收到的药剂信息定义越高,对于加药类型,越严重的加药定义越高,所述加药位置基于所述电子地图模块进行定义,所述加药机器人首先获取所述电子地图模块中记载的污水工艺单元中的加药口位置信息,然后在电子地图模块中标示的加药位置为每一个选择距离其最近的污水工艺单元中的加药口,然而计算出与所述最近的污水工艺单元中的加药口之间的实际距离,并将该实际距离作为加药位置的定义的基准,距离加药口点越近,所述加药位置定义越高,所述数据分析模块,还对所述参数的定义进行累加,求出该药剂信息的重要度指数。
进一步,所述药剂信息的重要度指数通过对所述加药名称、加药类型、加药发生时间以及所述加药位置进行定义后进行累加而获得,并将所述重要度指数值按顺序从高到低地排序以确定所述污水厂加药的行走路线规划。
进一步,所述化学电流传感器为化学传感转换电流信号传感器。
本发明达到了如下效果:本发明采用机器人头部单元与加药口中对应设置感应器化学传感并通过电流等信号转换和数据储存分析处理模块,其可以实现物与物之间的有效沟通,通过定义参数和控制模块实现了自动高效快速执行多种加药保障生产,本发明实施例所提供的污水厂加药机器人实现了直接执行污水工艺参数的工艺参数状态,达到了提高对污水工艺参数的执行准确度的效果。由此本发明可以自动地对加药位置进行分析判断并自己驱动运动并给出行走路线,自动化程度高,节省了执行时间和成本,运动控制准确及时,人员安全有保障。
当然,实施本发明的任一产品必不一定需要同时达到以上所述的所有技术效果。