
申请号CN201520879482.2
申请日2015.11.06
公开(公告)号CN205078986U
公开(公告)日2016.03.09
IPC分类号F16L55/32; F16L101/30
摘要
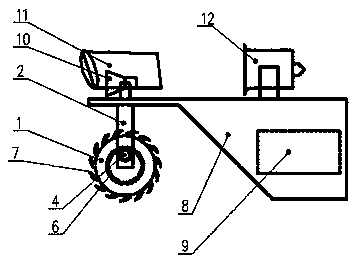
本实用新型涉及一种轮船式污水管道机器人,其特征在于:船壳底部为楔形结构,船壳前端顶部固定连接有摄像头,摄像头两侧各有一个照明灯,电动风扇固定连接在船壳后端顶部,船壳后端为空腔结构作为控制仪器舱,轮支架垂直连接在船壳前端底部,划水轮的轮轴与轮缘之间设有轴承;划水轮内侧设有内齿轮、外侧设有爬坡齿,轮支架下端与划水轮的轮轴固定连接,电机支座固定连接在划水轮的轮轴空腔内,电机固定连接在电机支座上,电机的输出轴的主动轮与划水轮的内齿轮啮合。其能在污水环境使用,既能在浅水段的泥浆中行驶、也能在深水段行驶,还能翻越垃圾障碍。
权利要求书
1.轮船式污水管道机器人,其特征在于:船壳底部为楔形结构,船壳前端顶部固定连接有摄像头,摄像头两侧各有一个照明灯,电动风扇固定连接在船壳后端顶部,船壳后端为空腔结构作为控制仪器舱,轮支架垂直连接在船壳前端底部,划水轮的轮轴与轮缘之间设有轴承;划水轮内侧设有内齿轮、外侧设有爬坡齿,轮支架下端与划水轮的轮轴固定连接,电机支座固定连接在划水轮的轮轴空腔内,电机固定连接在电机支座上,电机的输出轴的主动轮与划水轮的内齿轮啮合。
说明书
轮船式污水管道机器人
技术领域
本实用新型涉及一种轮船式污水管道机器人,特别涉及一种在城市污水管道、暗渠内行驶,用于检查、取样、定位的机器人。
背景技术
目前市场上的管道机器人按驱动方式有:爬行式、轮式、船式。爬行式主要适用于净水、内壁光滑的较小直径的管道;轮式适用于较大直径的管道,但是要求水深不超过10cm泥浆厚度小于5cm的净水管道;船式虽然可以在深水区使用,但是污水管道内杂物多、水深不同、污染程度不同,里面树枝、垃圾极多,小船很难在污水管道内顺利前进。因此需要开发一种能够水路两栖的有一定越障碍能力的新型污水管道机器人。
发明内容
本实用新型的目的是提供一种轮船式污水管道机器人,其能在污水环境使用,既能在浅水段的泥浆中行驶、也能在深水段行驶,还能翻越垃圾障碍。
本实用新型的技术方案是这样实现的:轮船式污水管道机器人,其特征在于:船壳底部为楔形结构,船壳前端顶部固定连接有摄像头,摄像头两侧各有一个照明灯,电动风扇固定连接在船壳后端顶部,船壳后端为空腔结构作为控制仪器舱,轮支架垂直连接在船壳前端底部,划水轮的轮轴与轮缘之间设有轴承;划水轮内侧设有内齿轮、外侧设有爬坡齿,轮支架下端与划水轮的轮轴固定连接,电机支座固定连接在划水轮的轮轴空腔内,电机固定连接在电机支座上,电机的输出轴的主动轮与划水轮的内齿轮啮合。
本实用新型的积极效果是其易于在污水管道内有树枝、塑料袋、树叶、碎布条等垃圾的环境中行驶;划水轮尺寸较大,有足够容积提供浮力、轮体内可以容纳电机、电池、减速器;划水轮外侧设有爬坡齿易于拨开或爬过漂浮的杂物,同时还能避免塑料布等杂物缠绕在旋转轴上;船体底部设计成楔形,易于爬过杂物。