
1 曝气过程被控对象模型及处理
活性污泥处理废水系统是一个多变量的分布参数线性生物化学反应过程,建立其数学模型是一大难题。本文仅讨论曝气机速度与溶解氧(DO)浓度之关系,简述如下:
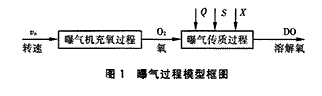
溶解氧(DO)的形成是非线性的,瞬间完成的;而氧的转移是无源的,可用双膜理论来解释(见图1)。
 |
1.1 曝气机
垂直提升式E型叶轮表面曝气机的充氧量、叶轮直径与线速度的关系有如下经验公式:
Qcm=0.37v0.28・D1.88・K(1)
式中 Qcm――标准条件下的充氧量,kg/h
v ――速度,m/s
D ――叶轮直径,m
K ――池型系数(对方型池,K=0.64)
1.2 氧的转移
氧气转移速率取决于下列各因素:气相中氧分压梯度;液相中氧的浓度梯度;气液相间的接触时间和接触面积;水温;污水的性质以及水流的紊流程度等。
当混合液中氧的浓度为零时,由于具有最大的推动力,因此氧的转移率最大。在一定条件下,氧的转移速率应等于活性污泥微生物的需氧速率:
dC/dt=Kla(Cs-C) (2)
式中 C――液相中溶解氧浓度,mg/L
Cs――界面处的溶解氧浓度,mg/L
Kla――氧总转移系数,L/h
1.3 溶解氧(DO)检测
常用的DO连续测定方法是隔膜电极法。其隔膜采用聚四氟乙烯纤维、聚乙烯等组成,用铂、金作正电极,铝、铅作负电极,电解液用氯化钾等溶液。当把这种电极浸入测定水中,连通电流测定回路,则产生电流,其电流大小与水中通过隔膜的DO浓度成比例。根据DO仪的测定原理及电化学方程式分析有:
DOnt=DOst+rcm/α=(1-e-et) (3)
式中 DOnt――t时刻DO的实测量值,mg/L
DOst――t时刻水样中实际DO浓度,mg/L
rcm――实际OUR值,mg/(L・min)
α――DO仪氧电极响应速度的参数,min-1,在高浓度时 α=9.2min-1
可见,DO检测是非线性,具有滞后特性。
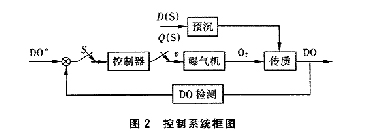
综上所述,可构成曝气机速度控制系统方框图,见图2。
 |
2 曝气机转速的模糊控制
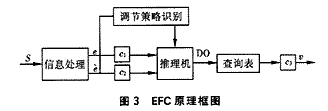
模糊控制运用模糊逻辑进行直觉推理。它不需要对象的精确数学模型,适合于高度非线性、扰动因素大、纯滞后、时变特性等对象的自动控制。实践表明,与传统的DDC和PID调节器相比,模糊控制器(FLC)有更快的响应和更小的超调,对被控系统参数的变化不敏感,能克服线性的影响。在此基础上发展的专家模糊控制器(EFC)(见图3),把人的经验知识和求解控制问题的启发式规则、手续进行模型化,强调知识的多层次及分类的需要。EFC在保持FLC优点的同时,丰富了适用于FLC的知识结构及内容,使其更具灵活性。
 |
对于曝气机转速来说,其任务是将进水水质水量变化引起的DO改变尽快地控制在允许的范围之内,且需有一定的鲁棒性以适应废水处理过程因素变化的需要。因此,曝气机转速EFC应具备这样的控制思想:DO浓度偏离较大时,采取较大的控制量输出(转速变化较高),以体现纠偏迅速;DO浓度偏离较小时,采取较慎微的控制量输出,以减小过调并提高对e和è的分辩率,提高调节精度。有废水需要处理的单位,也可以到污水宝项目服务平台咨询具备类似污水处理经验的企业。
其模糊查询表如下:
若 |c1en|>A则粗调(1)
|c1en|>B>|c1en-1| 则中调(2)
|c1en|>C>|c1en-1| 则细调(3)
微调 (4)
上表中,优先级依次递减。其中A>B>C为经验值,en为当前采样DO浓度偏离量,en-1为前一次采样偏离量。
为便于实际应用,减少EFC的参数,对上述规则进一步简化。
2.1 调节策略识别规则
IF |c1en|>6C THEN L=1(粗调)
IF |c1en|>3C>|c1en-1| L=3(中调)
IF |c1en|>C>|c1en-1|L=2 (细调)
L1=1 (微调)
上式中,优先级一次递减。
2.2 控制规则和查询表
IF E and EC THEN L (调节变量)
IF L and U THEN Y
其中E、EC、L、U、Y分别为DO浓度偏离量、偏离变化量、调节变量、调节策略、控制器输出的模糊量。
输出值Y经过逆量化后转化成实际输出量作为曝气机转速给定,通过曝气机,改变充氧量,实施对废水处理系统中DO浓度的控制。
3 仿真研究
以前面讨论的系统为例来进行仿真研究,其控制系统见图2。废水处理系统的干扰D(S )主要是进水水质、水量变化,在这里将它看作理想的正弦干扰,其变化规律:
Q(t)=Q +5000sin(2πt)
S0(t)=S0 +0.05sin(2πt)
将EFC应用于废水处理系统,并将它与PID调节器相比较。其中,设S0=0.150kgBOD/m3,Q=10000m3/d,f=(1/24)h,α=0.42
将EFC应用于废水处理系统,并将它与PID调节器相比较。其中,设S0=0.150kgBOD/m3,Q=10000
仿真结果表明,EFC具有比PID调节优越得多的调节品质和对系统参数的鲁棒性。
4 结语
研究结果表明,活性污泥法废水处理系统中曝气机速度采用专家模糊控制具有良好的调节品质和对系统参数变化的鲁棒性。EFC不需要确切了解对象的数学模型,设计原理简单,对系统参数的改变不敏感,有较强的适应性;且方案实施简单,性价比高,具有一定的推广价值。来源:中国环保频道