
申请日2009.01.16
公开(公告)日2009.07.08
IPC分类号G01N1/14; G03B29/00
摘要
一种小型车载污水取样装置,包括小型遥操作移动机器人,在小型遥操作移动机器人上设有水泵、透明密闭容器、机械手臂及用于获取事故现场的图像及监测被取样污水的容量第二摄像头,第二摄像头位于透明密闭容器的后方,在水泵上设有取样管和导管,并且水泵的进水口与取样管的一端连接,取样管的另一端与机械手臂绑定,导管的一端与水泵的出水口连接,导管的另一端与透明密闭容器连接,在机械手臂上设有第一摄像头。本发明可应用于高污染有害环境下,人员无法接近,如化学品泄漏及工业污水污染事故现场,并实现对污水取样。本发明以小型遥操作移动机器人为平台,以遥操作的移动机器人替代环保人员进入污染现场,实现了环保人员的零伤亡。
权利要求书
1.一种小型车载污水取样装置,其特征在于包括小型遥操作移动机器人(9), 在小型遥操作移动机器人(9)上设有水泵(1)、透明密闭容器(2)、机械手臂 (5)及用于获取事故现场的图像及监测被取样污水的容量第二摄像头(6),第 二摄像头(6)位于透明密闭容器(2)的后方,在水泵(1)上设有取样管(4) 和导管(3),并且水泵(1)的进水口与取样管(4)的一端连接,取样管(4) 的另一端与机械手臂(5)绑定,导管(3)的一端与水泵(1)的出水口连接, 导管(3)的另一端与透明密闭容器(2)连接,在机械手臂(5)上设有第一摄 像头(7)。
2.根据权利要求1所述的小型车载污水取样装置,其特征在于在第一摄像 头(7)上设有麦克风(8)。
说明书
小型车载污水取样装置
技术领域
本发明涉及高污染有害环境下的污水取样装置,特别是涉及搭载于小型移动 机器人上的小型车载污水取样装置。
背景技术
虽然移动机器人的概念和工作硬件已经出现了几十年,在有害环境或有潜在 危险条件下用机电设备替代一个或多个人员的这一想法已成为环保监测、执法部 门、以及勘测项目中的重要内容,但在最近不断发生的自然灾害和重工业污水泄 露事件中,很多单位研制的移动机器人只能进入现场侦测,而没有办法采集污染 液体,从而给污染情况的调查取证工作带来了难度。本专利就是发明了一种可安 装在小型移动机器人上的污水取样装置,用于完成在高污染有害或危险环境下对 污水的采集取样,实现了传统采集手段的创新。在携带了摄像头等监测仪器的遥 操作移动机器人进入污染现场后,通过无线传输将污水泄露事故现场的信息传回 本地操作平台,对污染源定位,远端操作员利用小型移动机器人远程操作系统, 通过控制机械手臂将抽水管插入受污染液面以下,控制电路得到采集液态样本的 指令后会启动微型水泵电源,将污水样本收集回车载密闭容器中。待采集完毕后 关闭采集系统,控制手臂将抽水管移出液面,完成受污染液体的采集工作。
发明内容
本发明提出了一种基于小型遥操作移动机器人的小型车载污水取样装置, 以使小型移动机器人能够代替环保人员进入高污染有害环境或潜在危险环境进 行污水取样。
为解决上述问题,本发明采用如下技术方案:
一种小型车载污水取样装置,包括小型遥操作移动机器人,在小型遥操作移 动机器人上设有水泵、透明密闭容器、机械手臂及用于获取事故现场的图像及监 测被取样污水的容量第二摄像头,第二摄像头位于透明密闭容器的后方,在水泵 上设有取样管和导管,并且水泵的进水口与取样管的一端连接,取样管的另一端 与机械手臂绑定,导管的一端与水泵的出水口连接,导管的另一端与透明密闭容 器连接,在机械手臂上设有第一摄像头。
与现有环境侦测技术相比,本发明具有如下优点:
本发明以小型遥操作移动机器人为平台,以遥操作的移动机器人替代环保人 员进入污染现场,实现了环保人员的零伤亡;本发明在污染现场,既可根据装载 的第二台摄像机传回的现场图像来了解污水泄露情况,也可根据装在机械手臂上 的麦克风帮助操作人员判断污染源位置,寻找污染源的方法灵活、简单、可靠; 由于本发明搭载了污水取样装置,在传统侦测的基础上,可现场对污水采集,减 少了环保人员调查取证的时间。
本发明可应用于高污染有害环境下,人员无法接近,如自然灾害、化学品泄 露及工业污水污染事故现场,并实现对污水取样。
附图说明
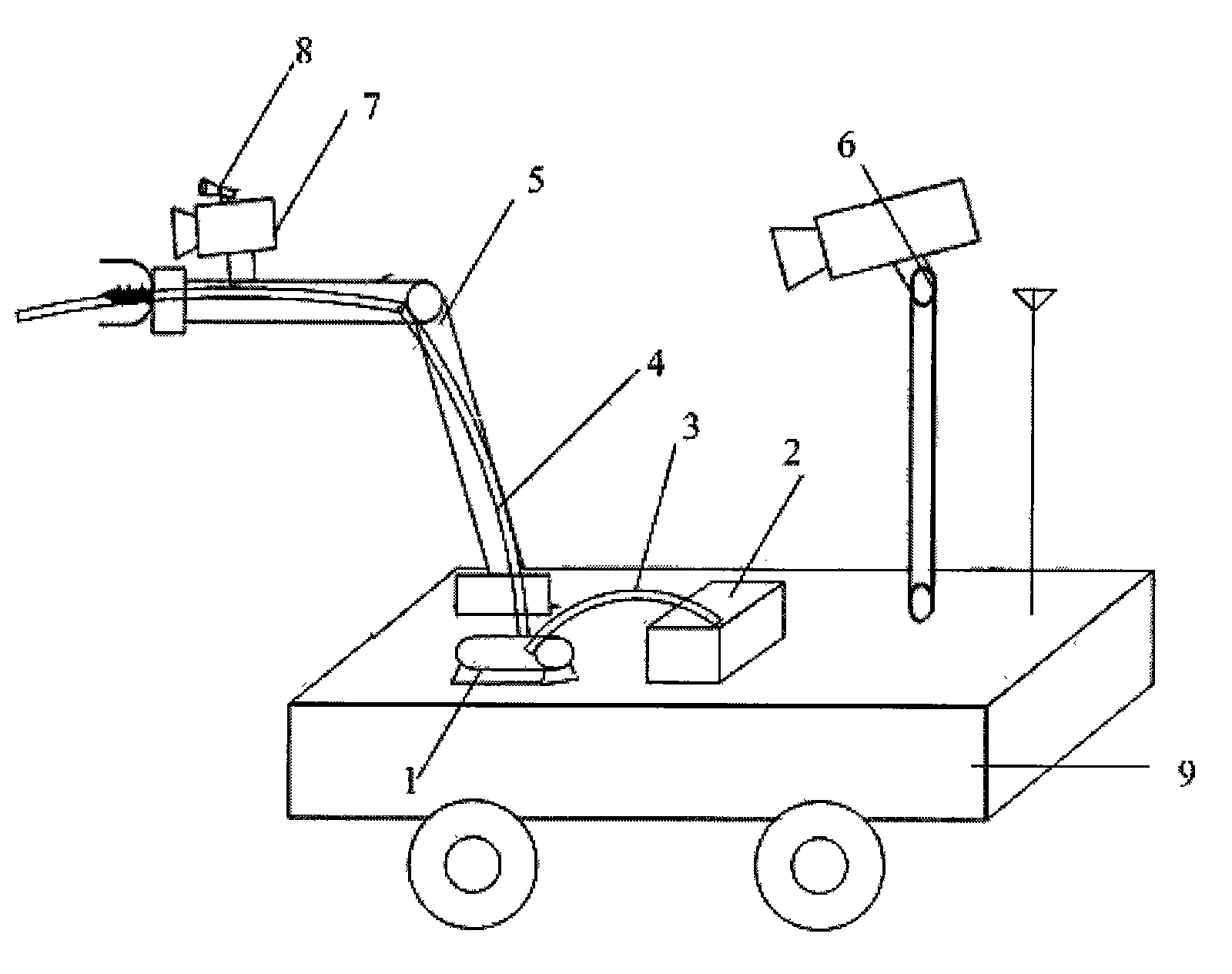
图1为在本发明的实施例中,微型水泵、密闭容器、摄像头、机械手的安装 及导管的连接示意图;
图2为在本发明的实施例中,污水取样远程控制示意图;
图3为在本发明的实施例中,利用小型车载污水取样装置采集污水的操作流 程示意图。
具体实施方式
一种小型车载污水取样装置,包括小型遥操作移动机器人9,在小型遥操 作移动机器人9上设有水泵1、透明密闭容器2、机械手臂5及用于获取事故现 场的图像及监测被取样污水的容量第二摄像头6,第二摄像头6位于透明密闭容 器2的后方,在水泵1上设有取样管4和导管3,并且水泵1的进水口与取样管 4的一端连接,取样管4的另一端与机械手臂5绑定,导管3的一端与水泵1的 出水口连接,导管3的另一端与透明密闭容器2连接,在机械手臂5上设有第一 摄像头7。本实施例还在第一摄像头7上设有麦克风8。
具体来说,本发明包括:
一、微型水泵,位于小型移动机器人前端,底部固定在小型移动机器人机 械手驱动控制装置上,其控制线接口连入机器人机械手驱动控制装置,用于对需 取样污水的采集;
二、透明密闭容器,固定在小型移动机器人车载仪器舱上,用于收集取样 的污水;
三、取样管及导管,连接所述微型水泵及透明密闭容器,其中,连接微型 水泵抽水端的取样管延伸至小型移动机器人车载机械手爪处,并与之绑定,以便 精确控制污水的抽取;导管连接述微型水泵出水端与透明密闭容器;
四、摄像机及图像传输系统,安装两台摄像机,第一台摄像机位于机械手腕 部,以实时控制抽水管的运动;第二台摄像机安装在透明密闭容器后方,以获取 事故现场的图像及监测被取样污水的容量;图像传输系统通过无线传输方式将图 像传给远端操作员;
五、机械手,机械手臂有两个关节,移动范围大,可灵活引导抽水管的运动; 机械手臂前端安装的工具可根据需要灵活更换。机械手腕部装有一个摄像机,用 于近距离观察操作对象,获取操作对象更为细致的图像。此外,机械手上方装有 小型麦克风,向远端操作员传回小型遥操作移动机器人所处污染事故现场的声音 信号,如受污染液体的泄漏声,便于操作员员更快地完成调查取证工作,提高工 作效率。
所述的小型车载污水取样装置,其中,所述微型水泵固定在小型移动机器人 车体前部,其外控制线路接口通过导线接入机器人机械手驱动控制器;
所述的小型车载污水取样装置,其中,所述密闭容器固定在小型移动机器人 车载仪器舱上;
所述的小型车载污水取样装置,其中,所述连接微型水泵抽水端的取样管延 伸至小型移动机器人车载机械手爪处,并与之绑定;导管连接述微型水泵出水端 与透明密闭容器;
所述的小型车载污水取样装置,其中,所述两台摄像机,第一台摄像机位于 机械手腕部,以实时控制抽水管的运动;第二台摄像机安装在透明密闭容器后方, 以获取事故现场的图像及监测被取样污水的容量;
所述的小型车载污水取样装置,其中,所述机械手手臂有两个关节,机械手 上方装有第一台摄像机,用于近距离观察操作对象,获取操作对象更为细致的图 像。此外,机械手上方装有小型麦克风,向远端操作员传回小型遥操作移动机器 人所处污染事故现场的声音信号,如被污染液体泄漏声;
本发明在使用时,远端操作员先通过小型遥操作机器人携带的无线传输系 统,获取污水泄露事故现场图像,确定污染源,寻找到取样位置后,再利用小型 移动机器人远程遥操作系统,通过控制机械手臂将抽水管插入液面以下,控制电 路得到采集污染液体样本的指令后会启动微型水泵电源,将污水样本收集回车载 密闭容器中。待采集完毕后关闭采集系统,控制手臂将抽水管移出液面,完成液 体的采集工作,最后小型遥操作机器人携带车载污水取样装置返回。