
申请日2016.09.30
公开(公告)日2017.04.12
IPC分类号G05B19/05
摘要
本实用新型公开的是一种应用于城市污水管道机器人的控制系统,包括用于提供电源的供电系统模块、电机控制模块以及信号传输模块,所述供电系统模块包括至少五个不同输出档位的直流电变压器,该直流电变压器的输出端分别与所述电机控制模块和信号传输模块相配合连接设置。本实用新型不仅实现机器人及PLC控制器之间的远程通讯连接,实现无线远程控制机器人的功能,而且能够直接读取和观看摄像头等采集的信息,实现远程数据采集和生产过程实时监控、灵活控制、远程传输等,提高了控制精度,使机器人的诊断及维修更方便快捷。
权利要求书
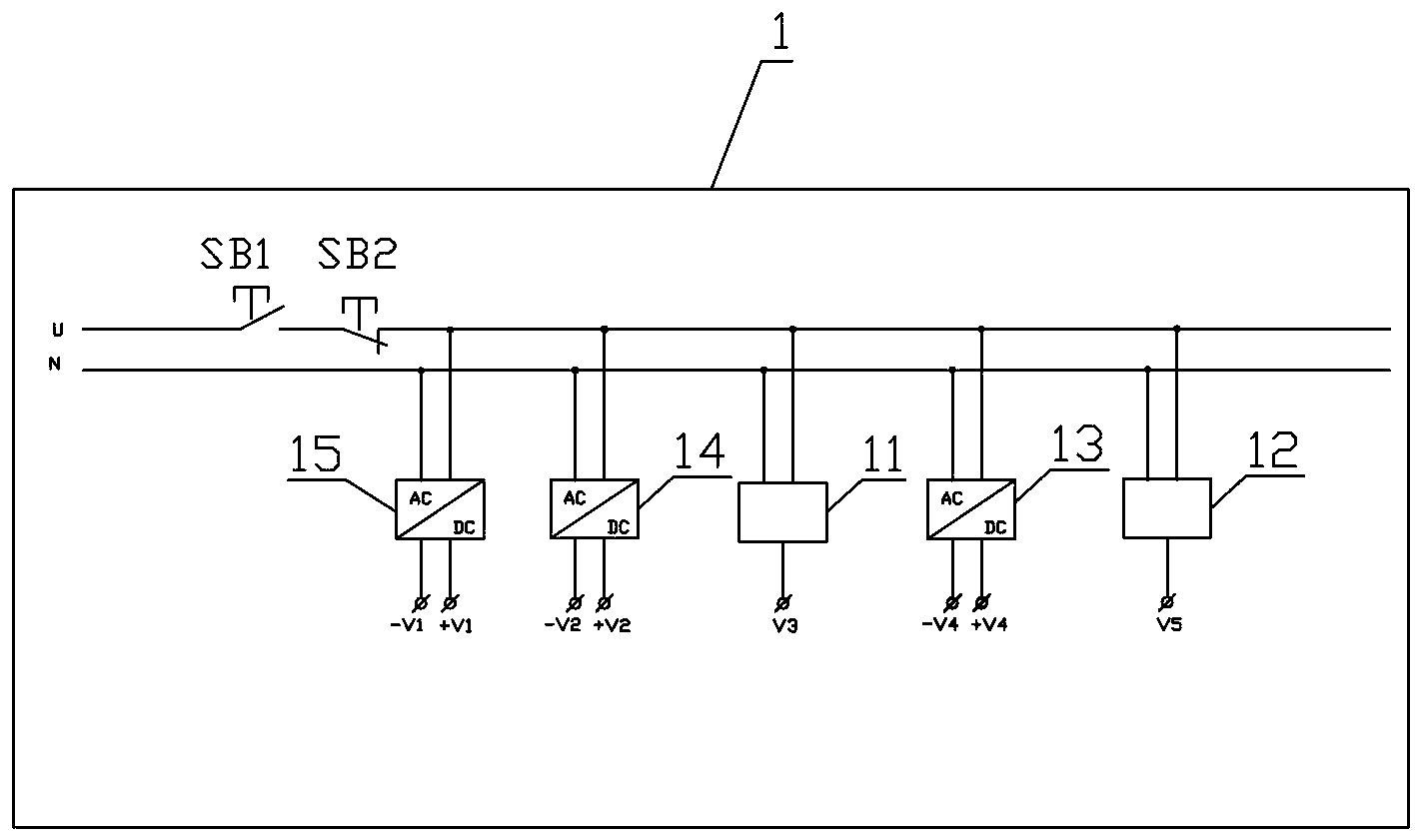
1.一种应用于城市污水管道机器人的控制系统,其特征在于:包括用于提供电源的供电系统模块、电机控制模块以及信号传输模块,所述供电系统模块包括至少五个不同输出档位的直流电变压器,该直流电变压器的输出端分别与所述电机控制模块和信号传输模块相配合连接设置;所述电机控制模块包括电机模块和控制模块,所述电机模块包括车体电机、云台电机,摄像头电机和缆线电机,所述控制模块包括控制板体和远程控制端,所述控制板体与所述电机模块相控制连接设置,所述远程控制端与所述控制板体无线控制连接设置;所述信号传输模块包括视频信号转网线、路由器以及网线转电平,所述视频信号转网线与网线转电平分别与所述路由器相输送连接设置。
2.根据权利要求1所述一种应用于城市污水管道机器人的控制系统,其特征在于:所述直流电变压器为五个,分别为路由器变压器、网线转电平变压器、用于输出12V直流电的第一变电器、用于输出24V直流电的第二变电器和用于输出36V直流电的第三变电器。
3.根据权利要求2所述的一种应用于城市污水管道机器人的控制系统,其特征在于:所述路由器变压器与所述路由器连接设置,所述网线转电平变压器与所述网线转电平相连接设置,所述视频信号转网线与所述第一变电器相连接设置。
4.根据权利要求1所述一种应用于城市污水管道机器人的控制系统,其特征在于:所述电机模块还包括一直流调速器,该直流调速器与所述车体电机相控制连接设置。
5.根据权利要求4所述的一种应用于城市污水管道机器人的控制系统,其特征在于:所述直流调速器上还设有一用于手动旋转控制输出电压大小的调速旋钮。
6.根据权利要求1所述的一种应用于城市污水管道机器人的控制系统,其特征在于:所述控制板体为PLC控制继电器。
说明书
一种应用于城市污水管道机器人的控制系统
技术领域
本实用新型涉及的是智能机械领域,更具体地说是一种应用于城市污水管道机器人的控制系统。
背景技术
城市排水管道是排除城市污水和雨水的重要途径,也是城市公用设施的组成部分,甚至成为城市稳定发展的基础设施,但是在长期的使用过程中,排水管道会在其内壁产生结垢、淤泥的沉积以及其它杂质,也会由于水流长期的冲刷管壁,导致管壁的磨损变薄、产生裂纹、甚至破损的情况,并且还会发生管壁的渗漏,管壁外部的泥土松动,随着水流冲走,形成空洞现象,导致路面的塌陷等问题。因此现需要一种多功能型城市排水管道检测机器人和适用于该机器人的控制系统,主要应用于城市排水管道的检测,发现管道内外的问题,及时清理和修复,并且能够适用于不同尺寸大小的排水管管径。
实用新型内容
本实用新型公开的是一种应用于城市污水管道机器人的控制系统,其主要目的在于克服现有技术存在的上述不足和缺点,提供一种机器人控制系统,它不仅实现机器人及PLC 控制器之间的远程通讯连接,实现无线远程控制机器人的功能,而且能够直接读取和观看摄像头等采集的信息,实现远程数据采集和生产过程实时 监控、灵活控制、远程传输等,提高了控制精度,使机器人的诊断及维修更方便快捷。
本实用新型采用的技术方案如下:
一种应用于城市污水管道机器人的控制系统,包括用于提供电源的供电系统模块、电机控制模块以及信号传输模块,所述供电系统模块包括至少五个不同输出档位的直流电变压器,该直流电变压器的输出端分别与所述电机控制模块和信号传输模块相配合连接设置;所述电机控制模块包括电机模块和控制模块,所述电机模块包括车体电机、云台电机,摄像头电机和缆线电机,所述控制模块包括控制板体和远程控制端,所述控制板体与所述电机模块相控制连接设置,所述远程控制端与所述控制板体无线控制连接设置;所述信号传输模块包括视频信号转网线、路由器以及网线转电平,所述视频信号转网线与网线转电平分别与所述路由器相输送连接设置。
更进一步,所述直流电变压器为五个,分别为路由器变压器、网线转电平变压器、用于输出12V直流电的第一变电器、用于输出24V直流电的第二变电器和用于输出36V直流电的第三变电器。
更进一步,所述路由器变压器与所述路由器连接设置,所述网线转电平变压器与所述网线转电平相连接设置,所述视频信号转网线与所述第一变电器相连接设置。
更进一步,所述电机模块还包括一直流调速器,该直流调速器与所述车体电机相控制连接设置。
更进一步,所述直流调速器上还设有一用于手动旋转控制输出电压大小的调速旋钮。
更进一步,所述控制板体为PLC控制继电器。
通过上述对本实用新型的描述可知,和现有技术相比,本实用新型的优点在于:
本实用新型的机器人控制系统以无线遥控器,PLC及以太网为基础,建立工控机,实现机器人及 PLC 控制器之间的远程通讯连接,实现无线远程控制机器人的功能,利用机器人搭载的传感器实时采集的信号,通过以太网远程传输到上位机,由此不仅实现了工控机与机器人设备的直接通讯,而且能够直接读取和观看摄像头等采集的信息,实现远程数据采集和生产过程实时 监控、灵活控制、远程传输等,不仅提高了控制精度,而且使机器人的诊断及维修更方便快捷。本实用新型的机器人控制系统应用于下水道空洞检测机器人领域,简单方便灵活,具有更大的实用价值。